

SHREC 2018 - 2D Scene Image-Based 3D Scene Retrieval
CVIU journal information
We published an extended CVIU journal based on SHREC'19 and SHREC'18 Sketch/Image Tracks! Please see the CVIU paper on the bottom.
Objective
The objective of this track is to evaluate the performance of different 2D scene image-based 3D scene retrieval algorithms using a 2D image query dataset and a collected 3D warehouse model dataset.
Introduction
Provided with a 2D scene image, a 2D scene image-based 3D scene retrieval algorithm is to search for relevant 3D scenes (.OBJ or .SKP file) from a dataset. It is an intuitive and convenient framework which allows users to learn, search, and utilize the retrieved results for related applications. For example, automatic 3D content generation based on one or a sequence of captured images for AR/VR applications, or 3D movie, game and animation production, robotic vision (i.e. path finding), and consumer electronics apps, which facilitate users to efficiently generate a 3D scene after taking an image of a real scene. It is also very promising and has great potentials in related applications such as 3D geometry video retrieval, and highly capable autonomous vehicles such as the Renault SYMBIOZ [1][2].
However, there is little research in 2D scene image-based 3D scene shape retrieval [3][4] due to two reasons: (1) the problem itself is challenging to cope with; (2) lack of related retrieval benchmarks. Seeing the benefit of advances in retrieving 3D scene models using 2D scene image queries makes the research direction meaningful, interesting and promising.
Deng et al. [5] collected the ImageNet database initially comprising of 5,247 synsets and 3.2 million images back in 2009. Nearly ten years after its inception, there over 21,000 synsets indexed and nearly 14.2 million images. For this track, we built a smaller and more manageable dataset comprising of 10,000 scene images across 10 classes, each with 1,000 images. It avoids the bias issue since we collected the same number of images for every class, while the images variation within one class is also adequate enough.
To organize a SHREC'18 2D scene sketch-based 3D model retrieval track [6], we have collected 1,000 3D Warehouse [7] scene mesh models (in original .SKP format as well transformed .OBJ format) to correspond to the 250 scene sketches equally divided into 10 classes in the Scene250 sketch dataset [8]. For each class, we collected the same number (100) of 3D scene models as well. We reuse this 3D scene target dataset for this track and only need to collect 2D scene images to form a query data, which are not difficult to find.
This track is organized to promote this challenging research direction by soliciting state-of-the-art 2D scene image-based 3D scene retrieval methods and foreseen the future directions on this research topic. Evaluation code for computing a set of performance metrics similar to those used in the Query-by-Model retrieval technique will also be provided.
Benchmark Overview
Our 2D scene image-based 3D scene shape retrieval benchmark SceneIBR utilizes 10,000 2D scene images selected from ImageNet [5] as its 2D scene image dataset and 1,000 3D Warehouse scene models (both .SKP and .OBJ formats) as its 3D scene dataset, and both have ten classes. Each of the ten classes contains the same number of 2D scene images (1,000) and 3D scene models (100).
To facilitate learning-based retrieval, we randomly select 700 images and 70 models from each class for training and use the remaining 300 images and 300 models for testing. We conclude this in Table 1. Participants need to submit results on the testing dataset only if they use a learning-based approach. Otherwise, the retrieval results based on the test (300 images, 30 models) and complete (10,000 images, 1000 models) datasets are needed. To provide a complete reference for future users of our SceneIBR benchmark, we will evaluate the participating algorithms on both the testing dataset (300 images and 30 models per query) and the complete SceneIBR benchmark (1,000 images and 100 models per class).

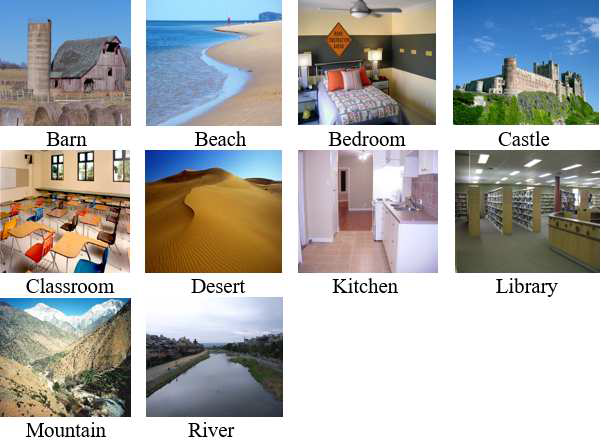
2D Scene Image Dataset
The 2D scene image query set is composed of 10,000 scene images (10 classes, each with 1,000 images) that are all from ImageNet [5], while all the classes have relevant models in the target 3D scene dataset which are downloaded from the 3D Warehouse [7]. One example per class is demonstrated in Fig. 1.
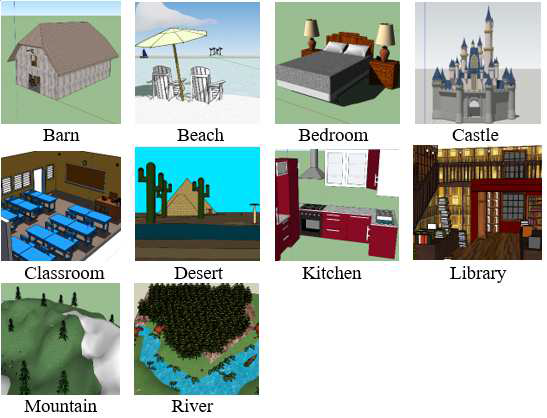
3D Scene Dataset
The 3D scene dataset is built on the selected 1,000 3D scene models downloaded from Google 3D Warehouse. Each class has 100 3D scene models. One example per class is shown in Fig. 2.
Evaluation Method
To have a comprehensive evaluation of the retrieval algorithm, we employ seven commonly adopted performance metrics in 3D model retrieval technique. They are Precision-Recall (PR) diagram, Nearest Neighbor (NN), First Tier (FT), Second Tier (ST), E-Measures (E), Discounted Cumulated Gain (DCG) and Average Precision (AP). We also have developed the code to compute them.
The Procedural Aspects
The complete dataset will be made available on the 1st of February and the results will be due in three weeks after that. Every participant is expected to perform the queries and send us their retrieval results. We will then do the performance assessment. Participants and organizers will collaborate to write a joint SHREC track competition report to detail the results and evaluations. Results of the track will be presented during the Eurographics 3DOR Workshop 2018 in Delft, Netherlands.
Procedure
The following list is a step-by-step description of the activities:
- The participants must register by sending a message to Hameed Abdul. Early registration is encouraged, so that we get an impression of the number of participants at an early stage.
- The database will be made available via this website. Dataset .
- Participants will submit the rank lists on the test (for learning-based methods), or on both the test and the complete (for non-learning based approaches) datasets. Up to 5 runs, either for the test or complete datasets, per group may be submitted. Each run may be a different algorithm, or a different parameter setting. More information on the rank lists file format. More information on the rank list file format.
- Participants write a one-page description of their method with at most two figures and submit it at the same time when they submit their running results.
- The evaluations will be done automatically.
- The organization will release the evaluation scores of all the runs.
- The track results are combined into a joint paper, and then published in the proceedings of the Eurographics Workshop on 3D Object Retrieval after review by the 3DOR and SHREC organizers.
- The description of the track and its results are presented at the 2018 Eurographics Workshop on 3D Object Retrieval (April 15-16, 2018).
Schedule
| January 22 | - Call for participation. |
| January 25 | - A few sample 2D scene images and 3D scene models will be available online. |
| January 31 (Extended!) | - Please register before this date. |
| February 1, 8:00 PM (UTC-6) | - Distribution of the database. Participants can start the retrieval or train their algorithms. |
| February 22, 11:59 PM (UTC-6) | - Submission of the results on the test (for learning-based methods), or on both the test and the complete (for non-learning based approaches) datasets and one-page description of their method(s). |
| February 25, 6:00 PM (UTC-6) | - Release of evaluation scores. |
| February 26 | - Track is finished and results are ready for inclusion in a track report. |
| February 28 | - Submit the track report for review. |
| March 3 | - Reviews done, feedback and notifications given. |
| March 10 | - Camera-ready track paper submitted for inclusion in the proceedings. |
| April 15-16 | - Eurographics Workshop on 3D Object Retrieval 2018, featuring SHREC'2018. |
Organizers
Hameed Abdul-Rashid, University of Southern Mississippi, USA
Juefei Yuan - University of Southern Mississippi, USA
Bo Li - University of Southern Mississippi, USA
Yijuan Lu - Texas State University, USA
References
[1] Renault. Renault SYMBIOZ Concept. https://www.renault.co.uk/vehicles/concept-cars/symbioz-concept.html. Accessed on January, 2018.
[2] Youtube. Driving a Multi-million Dollar Autonomous Car. https://youtu.be/vlIJfV1u2hM . Accessed on January, 2018.
[3] Matthew Fisher, Pat Hanrahan. Context-based search for 3D models. ACM Trans. Graph. 29(6): 182:1-182:10 (2010)
[4] Kai Xu, Vladimir G. Kim, Qixing Huang, Evangelos Kalogerakis. Data-Driven Shape Analysis and Processing. Comput. Graph. Forum 36(1): 101-132 (2017).
[5] Jia Deng, Wei Dong, Richard Socher, Li-Jia Li, Kai Li, Fei-Fei Li. ImageNet: A large-scale hierarchical image database. CVPR 2009: 248-255.
[6] SHREC'18 2D Scene-Based 3D Scene Retrieval website. https://sites.usm.edu/bli/SceneSBR2018/.
[7] 3D Warehouse. https://3dwarehouse.sketchup.com/?hl=en.
[8] Yuxiang Ye, Yijuan Lu and Hao Jiang. Human's Scene Sketch Understanding. ICMR, 355-358, 2016.
Please cite the paper:
[1] Juefei Yuan, Hameed Abdul-Rashid, Bo Li, Yijuan Lu, Tobias Schreck, Song Bai, Xiang Bai, Ngoc-Minh Bui, Minh N. Do, Trong-Le Do, Anh-Duc Duong, Kai He, Xinwei He, Mike Holenderski, Dmitri Jarnikov, Tu-Khiem Le, Wenhui Li, Anan Liu, Xiaolong Liu, Vlado Menkovski, Khac-Tuan Nguyen, Thanh-An Nguyen, Vinh-Tiep Nguyen, Weizhi Nie, Van-Tu Ninh, Perez Rey, Yuting Su, Vinh Ton-That, Minh-Triet Tran, Tianyang Wang, Shu Xiang, Shandian Zhe, Heyu Zhou, Yang Zhou, Zhichao Zhou. A Comparison of Methods for 3D Scene Shape Retrieval. Computer Vision and Image Understanding, Vol. 201, December, 2020.
[2] Hameed Abdul-Rashid, Juefei Yuan, Bo Li, Yijuan Lu, Song Bai, Xiang Bai, Ngoc-Minh Bui, Minh N. Do, Trong-Le Do, Anh-Duc Duong, Xinwei He, Tu-Khiem Le, Wenhui Li, Anan Liu, Xiaolong Liu, Khac-Tuan Nguyen, Vinh-Tiep Nguyen, Weizhi Nie, Van-Tu Ninh, Yuting Su, Vinh Ton-That, Minh-Triet Tran, Shu Xiang, Heyu Zhou, Yang Zhou, Zhichao Zhou, In: Alex Telea, Theoharis Theoharis and Remco Veltkamp (eds.), SHREC'18 Track: 2D Scene Image-Based 3D Scene Retrieval, Eurographics Workshop on 3D Object Retrieval 2018 (3DOR 2018), Delft, The Netherlands, April 16, 2018 (PDF, Slides, BibTex)